




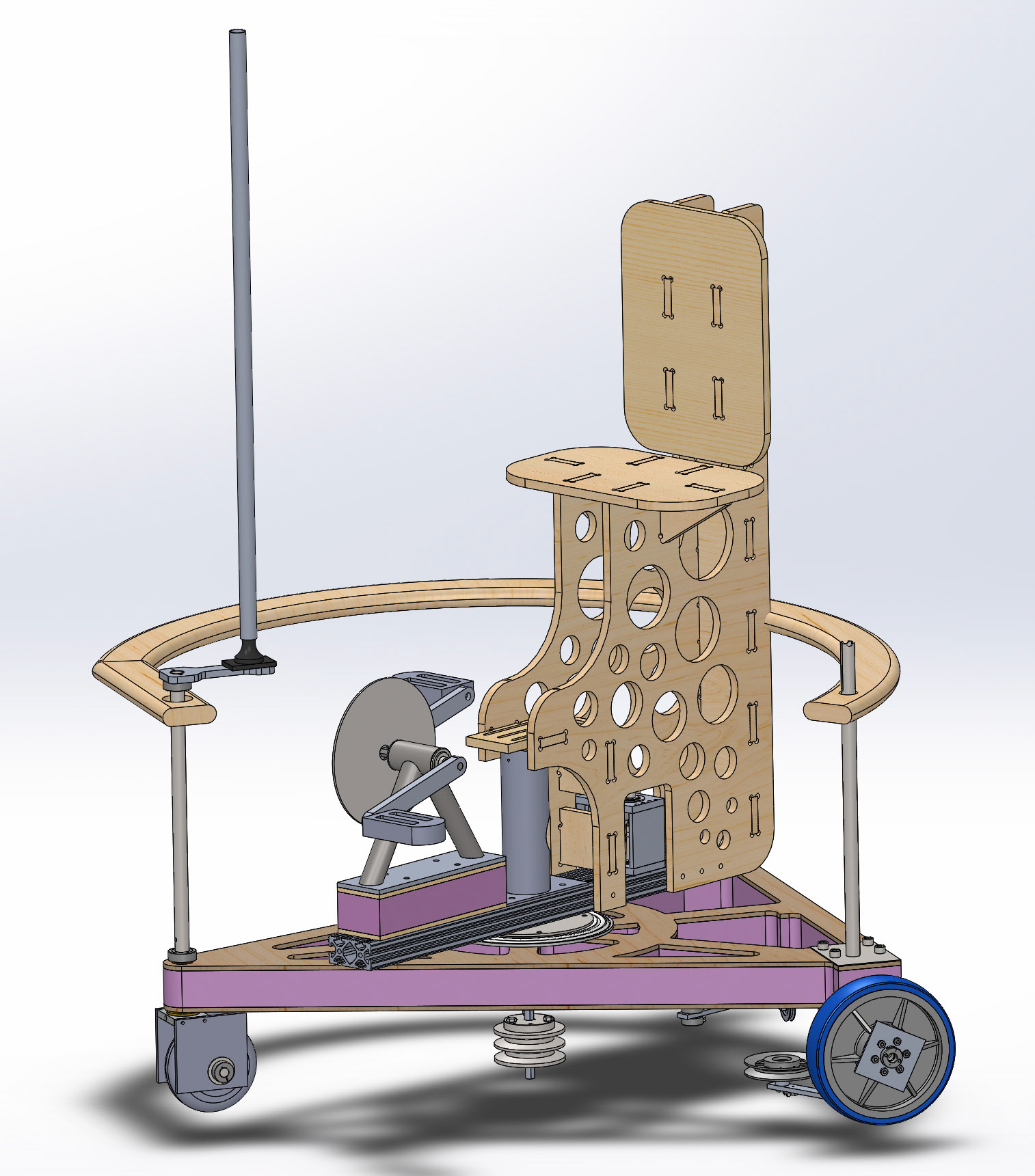

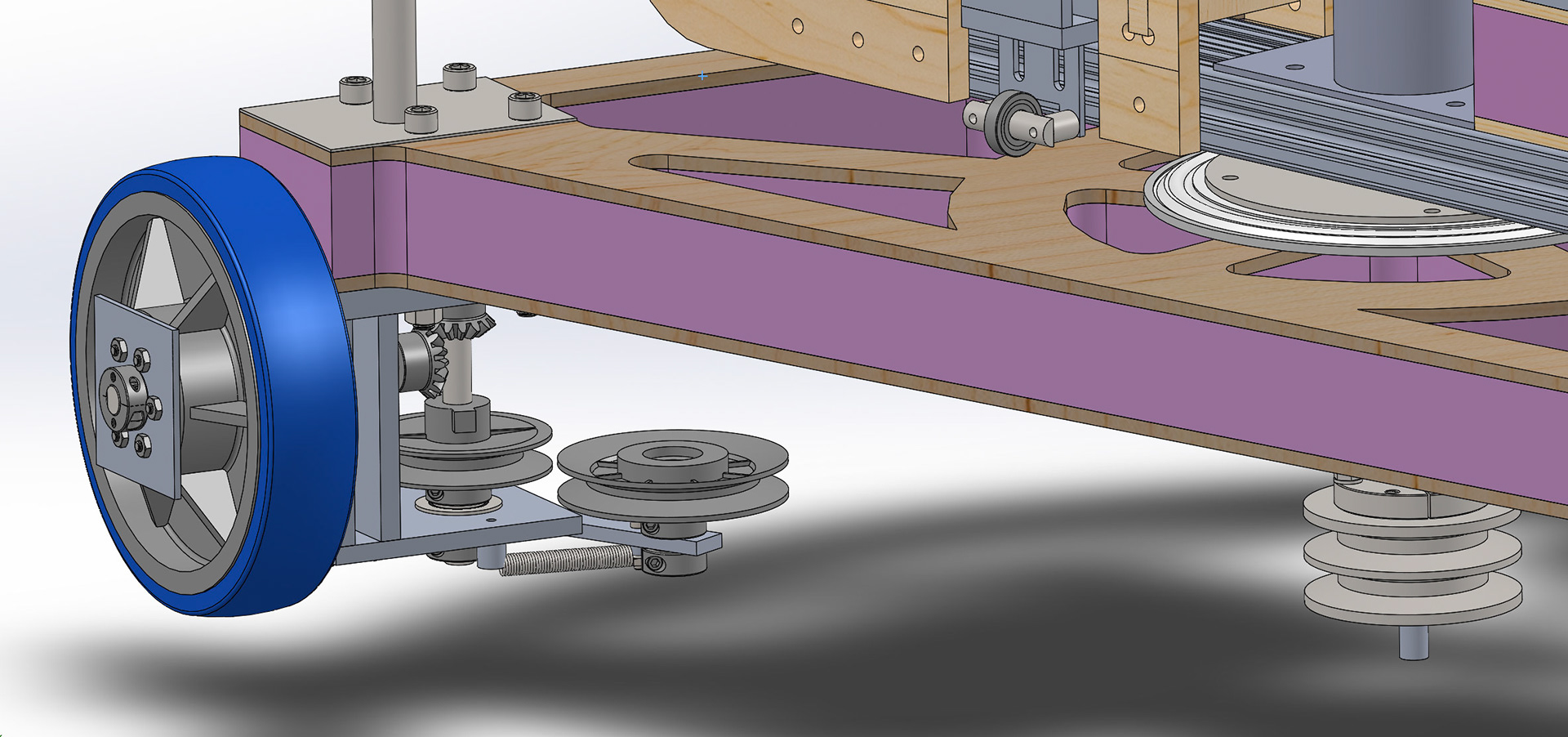


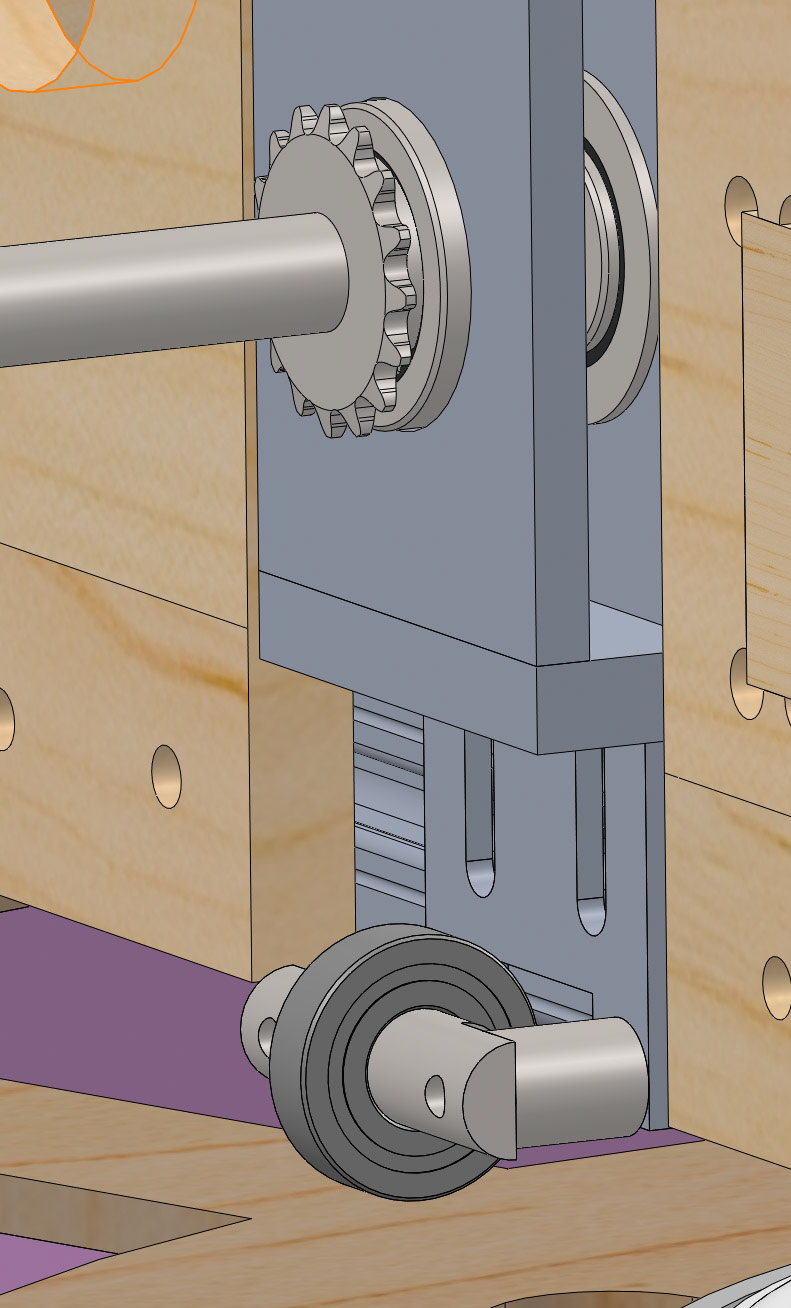
For ENGS 146 in the Spring 2019, as part of a four member team, I built a human-powered omni-directional vehicle. The vehicle was required to move in any direction while facing any direction and spin 360deg within its own footprint. My team and I used Solidworks and the Thayer School Machine Shop to design and fabricate our vehicle. I was responsible for the connection and power transmission system between the upper and lower chassis and the steering assembly.

